-
 A unipolar stepper motor has one winding with center tap per phase. Each section of windings is switched on for each direction of magnetic field. Since in this arrangement a magnetic pole can be reversed without switching the direction of current, the commutation circuit can be made very simple (e.g., a single transistor) for each winding. Typically, given a phase, the center tap of each winding is made common: giving three leads per phase and six leads for a typical two phase motor. Often, these two phase commons are internally joined, so the motor has only five leads.
A unipolar stepper motor has one winding with center tap per phase. Each section of windings is switched on for each direction of magnetic field. Since in this arrangement a magnetic pole can be reversed without switching the direction of current, the commutation circuit can be made very simple (e.g., a single transistor) for each winding. Typically, given a phase, the center tap of each winding is made common: giving three leads per phase and six leads for a typical two phase motor. Often, these two phase commons are internally joined, so the motor has only five leads. -

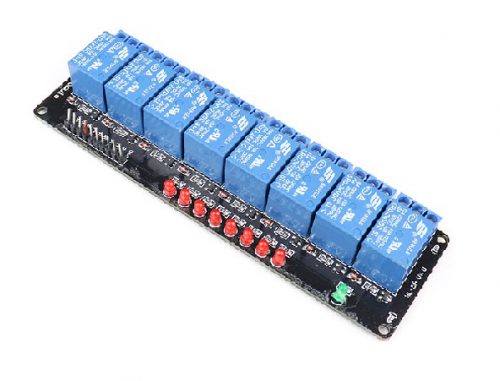
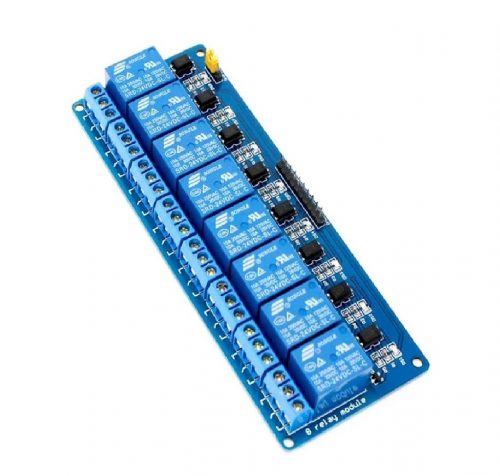
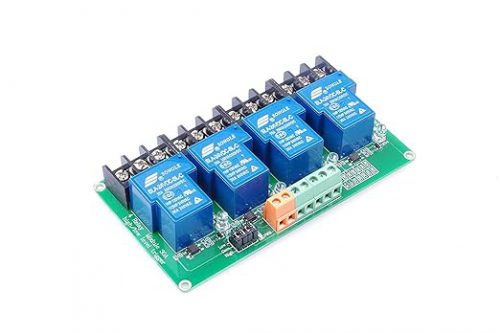 Supply Voltage - DC 24V / Quiescent Current: 5mA Maximum Operating Current - 190mA / Trigger Mode- high and low-level trigger Load Voltage- DC 30V / AC250 / Load Current- 30A
Supply Voltage - DC 24V / Quiescent Current: 5mA Maximum Operating Current - 190mA / Trigger Mode- high and low-level trigger Load Voltage- DC 30V / AC250 / Load Current- 30A# Image shown is a representation only #
-
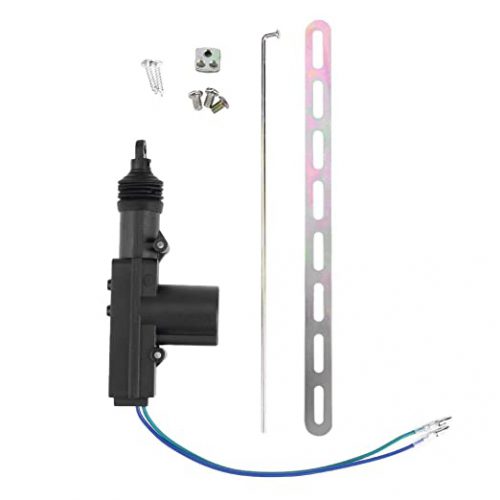 360 degree rotation Current consumption: 0.15A-2.22A Push & pull force:Â 4kg # Image shown is a representation only #
360 degree rotation Current consumption: 0.15A-2.22A Push & pull force:Â 4kg # Image shown is a representation only # -
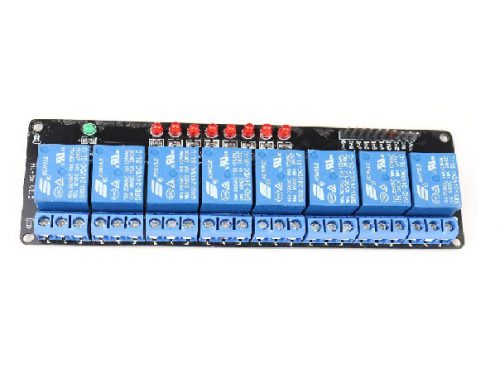
 '-24V 2-Channel Relay interface board, and each one needs 50-60mA Driver Current. -Equipped with high-current relay, AC250V 10A ; DC30V 10A. -Standard interface that can be controlled directly by microcontroller (Arduino , 8051, AVR, PIC, DSP, ARM, ARM, MSP430, TTL logic). -Indication LED’s for Relay output status.
'-24V 2-Channel Relay interface board, and each one needs 50-60mA Driver Current. -Equipped with high-current relay, AC250V 10A ; DC30V 10A. -Standard interface that can be controlled directly by microcontroller (Arduino , 8051, AVR, PIC, DSP, ARM, ARM, MSP430, TTL logic). -Indication LED’s for Relay output status. -

 Use Fluid: AIR Air Leakage: 1c.c.max/min 220mmHg Pressure: MAX 7PSI
Use Fluid: AIR Air Leakage: 1c.c.max/min 220mmHg Pressure: MAX 7PSI# Image shown is a representation only #
-

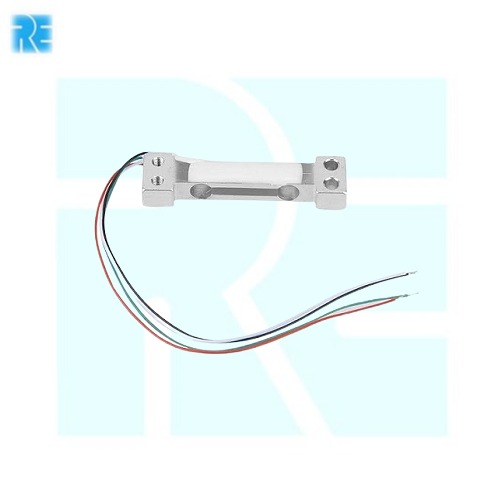 200grm Straight Bar Mini Load Cell RSN-157 Weight Capacity Max - 200 g Maximum Overload - 220 g Cell Repeatability Error Max - ± 50 mg Cell Non-Linearity Max - 50 mg Cell Hysteresis Max - 50 mg Electrical Properties Rated Output - 600 μV/V Rated Output Error Max ± 150 μV/V Output Impedance 1 kΩ Creep 100 mg/hr Temperature Effect on Zero 5 mg/°C Temperature Effect on Span 5 mg/°C Supply Voltage Min 3 V DC Supply Voltage Max 10 V DC Zero Balance Ratio ± 100 μV/V Material - Aluminium Alloy (LY12CZ) Screw Thread Size - 2.5M 47mm x 12mm x 6mm, 110mm Wire
200grm Straight Bar Mini Load Cell RSN-157 Weight Capacity Max - 200 g Maximum Overload - 220 g Cell Repeatability Error Max - ± 50 mg Cell Non-Linearity Max - 50 mg Cell Hysteresis Max - 50 mg Electrical Properties Rated Output - 600 μV/V Rated Output Error Max ± 150 μV/V Output Impedance 1 kΩ Creep 100 mg/hr Temperature Effect on Zero 5 mg/°C Temperature Effect on Span 5 mg/°C Supply Voltage Min 3 V DC Supply Voltage Max 10 V DC Zero Balance Ratio ± 100 μV/V Material - Aluminium Alloy (LY12CZ) Screw Thread Size - 2.5M 47mm x 12mm x 6mm, 110mm Wire -

 2 Axis Pan Tilt Brackets For Camera/Sensors for Servo MG90S E-873 PV Nylon Head Two Axial plastic / Two axial platform Anti-vibration lightweight Good design and shape Net weight 20g Color : Black Material: Plastic.
2 Axis Pan Tilt Brackets For Camera/Sensors for Servo MG90S E-873 PV Nylon Head Two Axial plastic / Two axial platform Anti-vibration lightweight Good design and shape Net weight 20g Color : Black Material: Plastic. -

 Key Board Size:40X20X0.8mm Total Length:134mm Current : 30mA;Contact Resistance : > 100 Ohm; Force : 250 350g
Key Board Size:40X20X0.8mm Total Length:134mm Current : 30mA;Contact Resistance : > 100 Ohm; Force : 250 350g# Image shown is a representation only #

YOUR PARTNER IN TECHNOLOGY SOLUTIONS
YOUR PARTNER IN TECHNOLOGY SOLUTIONS










No.1030, Shriram Building,
Near Nagnath Par,
Sadashiv Peth, Pune – 411030,
Maharashtra, India
![]() Visit Our store
Visit Our store
STORE TIMINGS
Monday to Saturday
10:00 AM to 7.30 PM
(Store closed on all Sundays and Public Holidays)
NOTE
*All the prices are excluding Tax rates & are subject to change after a specific period of time.
Copyright © 2024@AbhinavDCS